from math import sqrt
from compas.geometry import Translation
from compas_cem.diagrams import TopologyDiagram
from compas_cem.elements import Node
from compas_cem.elements import TrailEdge
from compas_cem.elements import DeviationEdge
from compas_cem.loads import NodeLoad
from compas_cem.supports import NodeSupport
from compas_cem.equilibrium import static_equilibrium
from compas_cem.optimization import Optimizer
from compas_cem.optimization import TrailEdgeForceConstraint
from compas_cem.optimization import DeviationEdgeParameter
from compas_cem.plotters import Plotter
# ------------------------------------------------------------------------------
# Instantiate a topology diagram
# ------------------------------------------------------------------------------
topology = TopologyDiagram()
# ------------------------------------------------------------------------------
# Add nodes
# ------------------------------------------------------------------------------
width = 4.0
height = width / 2
topology.add_node(Node(1, [-width / 2.0, height, 0.0]))
topology.add_node(Node(2, [width / 2.0, height, 0.0]))
topology.add_node(Node(3, [0.0, height / 2.5, 0.0]))
topology.add_node(Node(4, [0.0, 0.0, 0.0]))
# ------------------------------------------------------------------------------
# Add edges
# ------------------------------------------------------------------------------
topology.add_edge(TrailEdge(3, 4, length=-height/2))
topology.add_edge(DeviationEdge(1, 3, force=-sqrt(4.0)))
topology.add_edge(DeviationEdge(2, 3, force=-sqrt(2.0)))
topology.add_edge(DeviationEdge(1, 2, force=2.0))
# ------------------------------------------------------------------------------
# Add supports
# ------------------------------------------------------------------------------
topology.add_support(NodeSupport(4))
# ------------------------------------------------------------------------------
# Add loads
# ------------------------------------------------------------------------------
topology.add_load(NodeLoad(1, [0.0, -1.0, 0.0]))
topology.add_load(NodeLoad(2, [0.0, -1.0, 0.0]))
# ------------------------------------------------------------------------------
# Build trails and auto generate auxiliary trails
# ------------------------------------------------------------------------------
topology.build_trails(auxiliary_trails=True)
# ------------------------------------------------------------------------------
# Compute a state of static equilibrium
# ------------------------------------------------------------------------------
form = static_equilibrium(topology, eta=1e-5, tmax=100)
# ------------------------------------------------------------------------------
# Minimize the forces in the axiliary trails
# ------------------------------------------------------------------------------
optimizer = Optimizer()
# add goal constraints
for edge in topology.auxiliary_trail_edges():
optimizer.add_constraint(TrailEdgeForceConstraint(edge, force=0.0))
optimizer.add_constraint(TrailEdgeForceConstraint(edge, force=0.0))
# add parameters
optimizer.add_parameter(DeviationEdgeParameter((1, 2), 1.0, 10.0))
optimizer.add_parameter(DeviationEdgeParameter((1, 3), 1.0, 10.0))
optimizer.add_parameter(DeviationEdgeParameter((2, 3), 10.0, 1.0))
# optimize
form_opt = optimizer.solve(topology, "SLSQP", iters=100, eps=1e-6, verbose=True)
# ------------------------------------------------------------------------------
# Plot results
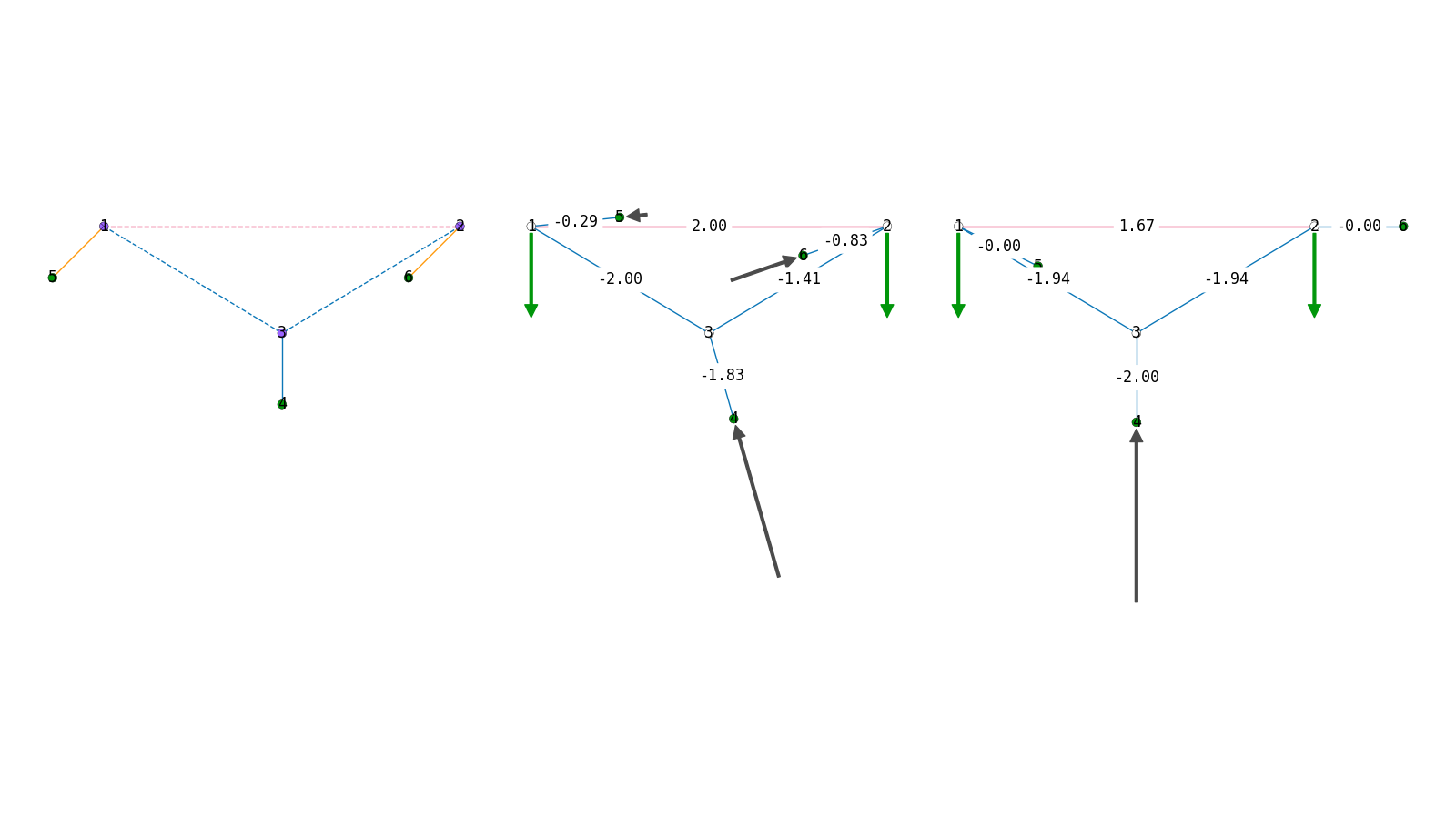
# ------------------------------------------------------------------------------
ns = 0.3
shift = width * 1.2
plotter = Plotter(figsize=(16.0, 9.0))
# plot topology diagram
plotter.add(topology,
nodesize=ns,
show_nodetext=True,
nodetext="key")
# plot translated form diagram
T = Translation.from_vector([shift, 0.0, 0.0])
plotter.add(form.transformed(T),
nodesize=ns,
show_nodetext=True,
nodetext="key",
show_edgetext=True,
edgetext="force")
# plot translated optimized form diagram
T = Translation.from_vector([shift * 2.0, 0.0, 0.0])
plotter.add(form_opt.transformed(T),
nodesize=ns,
show_nodetext=True,
nodetext="key",
show_edgetext=True,
edgetext="force")
# show scene
plotter.zoom_extents(padding=-1.2)
plotter.show()